近日,国际热核聚变实验堆(ITER)项目器内装配筹备工作传来关键进展,围绕等离子体室内壁近2万个定制化零部件安装的专用机器人研发、作业工具测试、协同作业体系搭建等核心工作全面落地,为后续器内装配高效开展筑牢技术与工程基础,也为全球核聚变工程化装备研发和协同作业积累了宝贵经验。
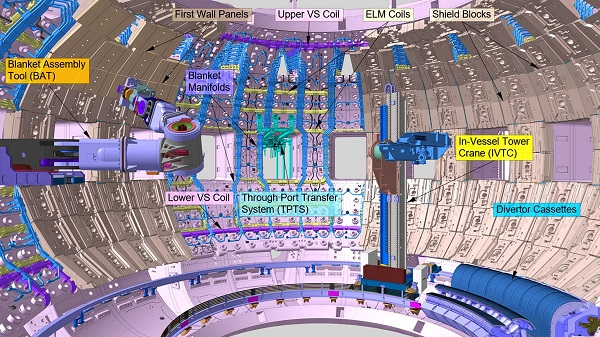
ITER器内装配堪称世界级工程难题,真空室内壁需安装线圈、集流管、包层模块、第一壁面板等部件,形成至少六层相互叠加的“系统层”,每层均由数千个零部件构成,且绝大多数零部件为定制化产品,作业空间狭小、部件排布密集,对装配精度和效率要求极高。为攻克这一难题,ITER团队创新打造了机器人、作业工具与操作人员高度协同的作业体系,将技术专家拉斐尔·埃里提出的“滚波式作业”作为核心策略。
该策略摒弃传统的任务依次开展模式,采用任务并行推进的作业组织方案,专业团队与装配工具沿真空室逐段推进完成指定层级零部件安装,团队向前推进的同时,后续团队即刻跟进开展下一层级作业,形成精密配合的“器内装配交响”,既大幅缩短装配工期,又有效降低多工序并行作业的安全风险。
名为“哥斯拉”的重型工业机器人是核心试验平台,为器内装配机器人的技术研发与工具测试提供关键支撑。这款目前市场上功率最强的商用工业机器人安装于托卡马克装置的地下层,机身高4米、机械臂最大伸展长度5米,可起吊2.3吨载荷,主要承担器内装配作业机器人工具与技术的研发测试任务。
目前,“哥斯拉”平台正在测试“工具转换器”局部原型机,该设备能让装配机器人根据作业流程快速、安全切换工具,可解决器内装配所需的30余种专用工具的切换难题,成为缩短工期的关键。基于该平台研发的ITER真空室定制化装配机器人,将兼具“视觉”与“触觉”双重核心能力:搭载欧盟核聚变能源机构研发的视觉系统,可实现作业工具与真空室安装靶点的精准对准;通过力扭矩传感器实现触觉感知,能“感知”并控制作业中施加于零部件或连接界面的动作、压力与作用力,确保狭小密集环境下的操作精准与安全,避免损伤真空室及周边部件。据悉,今年3月起,“哥斯拉”将在模拟实际作业环境的原型件与连接界面上,对研发中的各类工具开展系统性测试。

随着核心技术研发持续推进,ITER专用机器人体系已明确,技术成果转化工作同步启动。经“哥斯拉”平台验证的工具与技术,将集成至两款器内装配核心机器人:由法国CNIM公司原研并交付的器内塔式起重机,后续将完成适配优化;重达36吨、体积为“哥斯拉”三倍的包层装配运输机,目前正处于详细设计阶段,后续将由印度拉森特博有限公司负责制造。
根据现行的“滚波式作业”方案,未来两台重型包层装配运输机将与一台器内塔式起重机并行作业,操作人员还将在定制化移动升降作业平台上,借助研发中的零重力机械臂开展人工操作,实现机器人与人工的高效协同,为ITER器内装配的顺利推进提供全方位保障。

